수리과학, 물리학, 화학, 생명과학 분야와 이들을 기반으로 한 융&복합 분야
미래 산업 경쟁력 강화의 근간이 되는 소재 및 ICT 분야
과제 & 연구자
과제 & 연구자
큰 꿈을 향한 무한탐구의 연구열정,
삼성미래기술육성사업이 응원하며 함께 하겠습니다.
차세대 물리 시뮬레이션 = 파티클 기반 통합 시뮬레이션 + 딥러닝
1.연구 목표
딥 러닝을 이용하여 물체 간 상호작용, 화학반응, 물상 변화 등을 표현할 수 있는 파티클 기반 통합 시뮬레이션 기술을 개발한다.
2.연구 요약
본 연구는 딥 러닝을 이용한 파티클 기반 통합 물리 시뮬레이션(physics simulation)을 제작한다. 기존 파티클 기반 물리 시뮬레이션의 한계를 타파하기 위해, (1) 강체, 유체, 변형체 등 다종 다상 물체를 파티클의 형태로 표현하고, 이들의 움직임을 사실적으로 표현할 수 있는 하나의 통합 시뮬레이션 기법을 개발한다. (2) 다음으로 그 결과를 이용해 상호작용이 가능한 딥러닝 기반 시뮬레이터를 학습하여 시뮬레이션 생성 속도를 향상시킨다. (3) 마지막으로 2차원 키프레임 이미지를 컨텐츠 제작자가 제공하면 이를 통해 정밀한 3차원 시뮬레이션을 자동으로 생성하는 Dynamic scene generator 을 개발한다.
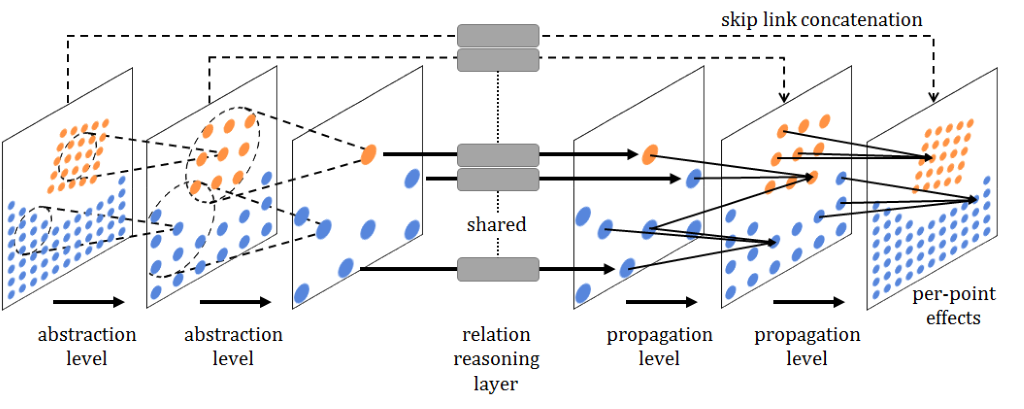
그림 1. 딥 러닝 기반 물리 시뮬레이터 모델
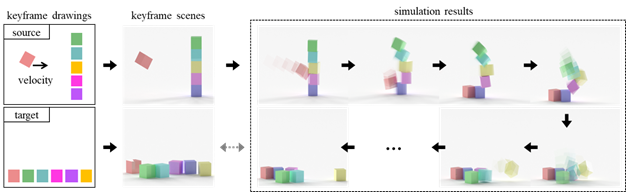
그림 2. Dynamic scene generator
3.연구의 필요성 및 기대 효과
다종 다상 물리 시뮬레이터는 풍부한 물리적 현상을 기존 기법보다 더욱 정밀하고 사실적으로 표현할 수 있으며, 딥러닝 기반 시뮬레이터는 이러한 시뮬레이션 생성 속도를 향상시켜 실시간 상호작용을 가능하게 할 수 있다. 이러한 정점들로 인해 비디오 게임, 애니메이션 및 장편 영화, 광고, VR/AR 애플리케이션 등에 응용될 수 있다. 또한 dynamic scene generator 덕분에 콘텐츠 제작자들은 고통스러운 반복 작업으로부터 해방될 것이며, 비전문가들도 높은 품질의 시뮬레이션을 자유롭게 제작하고 쉽게 활용할 수 있다.
1.연구 목표 딥 러닝을 이용하여 물체 간 상호작용, 화학반응, 물상 변화 등을 표현할 수 있는 파티클 기반 통합 시뮬레이션 기술을 개발한다. 2.연구 요약 본 연구는 딥 러닝을 이용한 파티클 기반 통합 물리 시뮬레이션(physics simulation)을 제작한다. 기존 파티클 기반 물리 시뮬레이션의 한계를 타파하기 위해, (1) 강체, 유체, 변형체 등 다종 다상 물체를 파티클의 형태로 표현하고, 이들의 움직임을 사실적으로 표현할 수 있는 하나의 통합 시뮬레이션 기법을 개발한다. (2) 다음으로 그 결과를 이용해 상호작용이 가능한 딥러닝 기반 시뮬레이터를 학습하여 시뮬레이션 생성 속도를 향상시킨다. (3) 마지막으로 2차원 키프레임 이미지를 컨텐츠 제작자가 제공하면 이를 통해 정밀한 3차원 시뮬레이션을 자동으로 생성하는 Dynamic